Máquinas de ensayo de suspensión no analógicas
Comportamiento real, actuadores electromagnéticos
Aplican a equipos de 2/4 post-rigs o un dinamómetro EMA
Permite probar amortiguadores bajo cualquier tipo de curva, diferentes velocidades de compresión y extensión, diferentes golpes durante una prueba. Todo esto es necesario en la simulación de una pista real.
Motor y controlador
Servomotor y controlador BOSCH/ REXROTH. Par máximo 198Nm, RPM máximo 2.800.
El servomotor tiene un sistema de soplado de dirección de enfriamiento y una unidad de resistencia de freno, para trabajar en condiciones de carga extremas.
Detección de posición y velocidad
Sistema codificador digital de alta precisión que lee directamente la posición de la plataforma y realiza un circuito cerrado con el codificador de servomotor.
También se pueden aplicar varios sensores analógicos o digitales al sistema, por ejemplo, para medir el chasis relativo y el movimiento de la rueda.
Posicionamiento
Resolución de posición: 0,005 mm (0,0002″)
Precisión de posición: 0,01 mm (0,004″)
Precisión de posicionamiento de cruceta: 0,02 mm (0,008″)
Límite de carrera Movimiento Crosshead MAX: 203 mm (8″)
Control de velocidad
El dispositivo Pronello realiza un control activo sobre el servoaccionamiento, con el fin de ajustar y mantener la posición y la velocidad de prueba.
Precisión de la velocidad de cruceta con carga cero o constante: +/- 0,3% de la velocidad establecida
Límite de velocidad de cruceta Velocidad máxima: 2.000mm/seg (79″/seg)
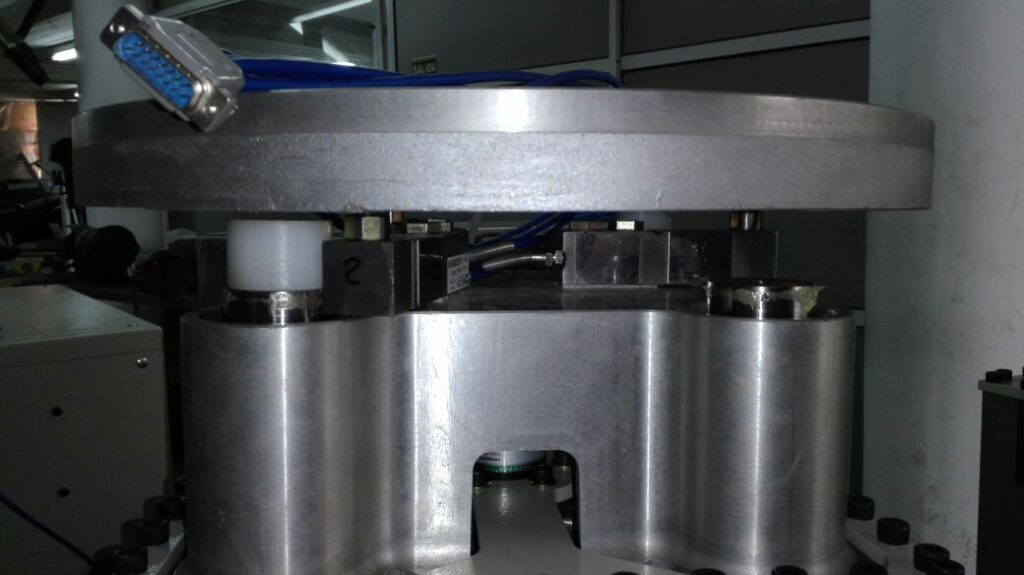
Detección de fuerza para pruebas de choque: Celda de carga tipo bloque S.
Para pruebas de ruedas (Post Rig): 3 celdas de carga tipo viga de flexión gemelas interconectadas, para tener una medición de fuerza regular en toda la superficie de la placa de la rueda.
Precisión de medición de carga:
+/-0,05% de lectura hasta el 5% y el 100% de la capacidad de la celda de carga.
+/-0,01% de lectura hasta el 1% y 100% de la capacidad de la celda de carga.
Límite de fuerza 1.500Kg (3.300lb)
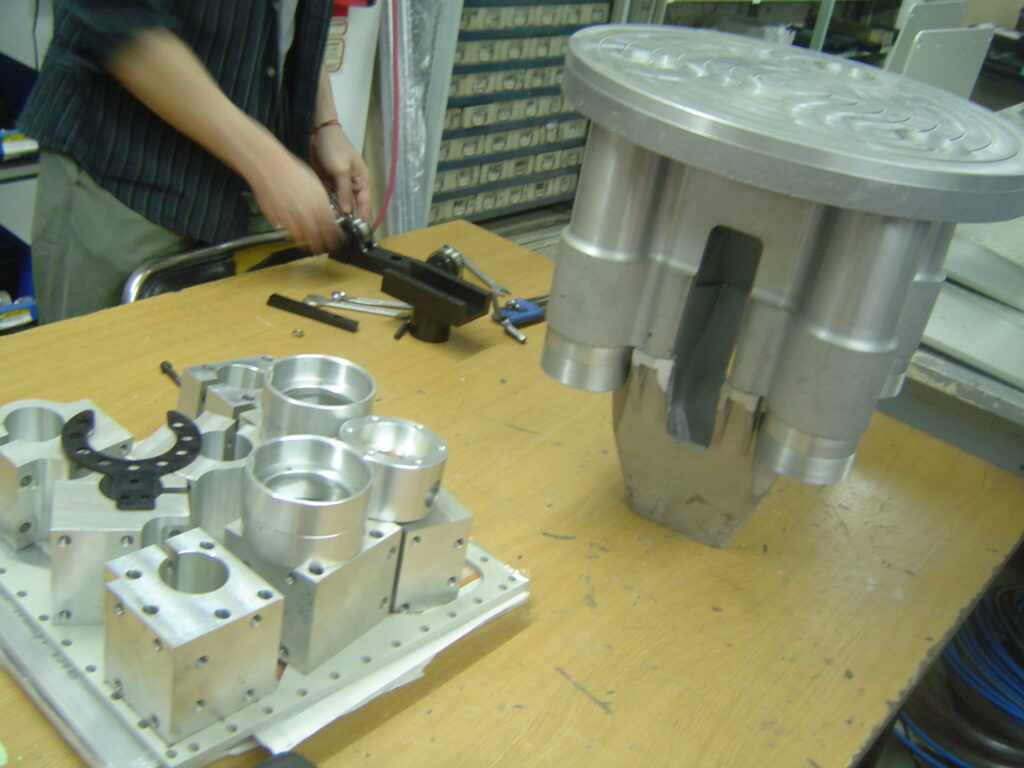
Transmisión
El servomotor se conecta directamente a un conjunto de eje / husillo de bolas recirculantes (sin consumo de energía como con un mecanismo de reducción). Un cubo especialmente diseñado le da al sistema cero huelgo para la dirección angular (rotación servo) y axial (eje del husillo de bolas). Para lograr esto, el ensamblaje del cubo tiene:
a- Dispositivo de acoplamiento Cero Backlash para conectar el servomotor y el conjunto del husillo de bolas.
b- Rodamientos de bolas de contacto angular precargados SKF de alta precisión de alta rigidez axial que permiten que el eje resista las cargas axiales del sistema con una deformación mínima.
Esto, combinado con el uso de rodamientos de bolas lineales para la guía de la plataforma, reduce todas las fricciones y las pérdidas del sistema de potencia, entregando toda la potencia al movimiento de la plataforma.
Transformación del movimiento y guía de la plataforma
Conjunto de husillo de bolas precargado de precisión BOSCH / REXROTH.
Para la guía de la plataforma, el actuador tiene 4 columnas con rodamientos lineales de bolas de la misma marca.
Sistema de adquisición de datos
De desarrollo exclusivo de PRONELLO, funciona combinado con accionamientos BOSCH/REXROTH.
Sistema totalmente comandado por software.
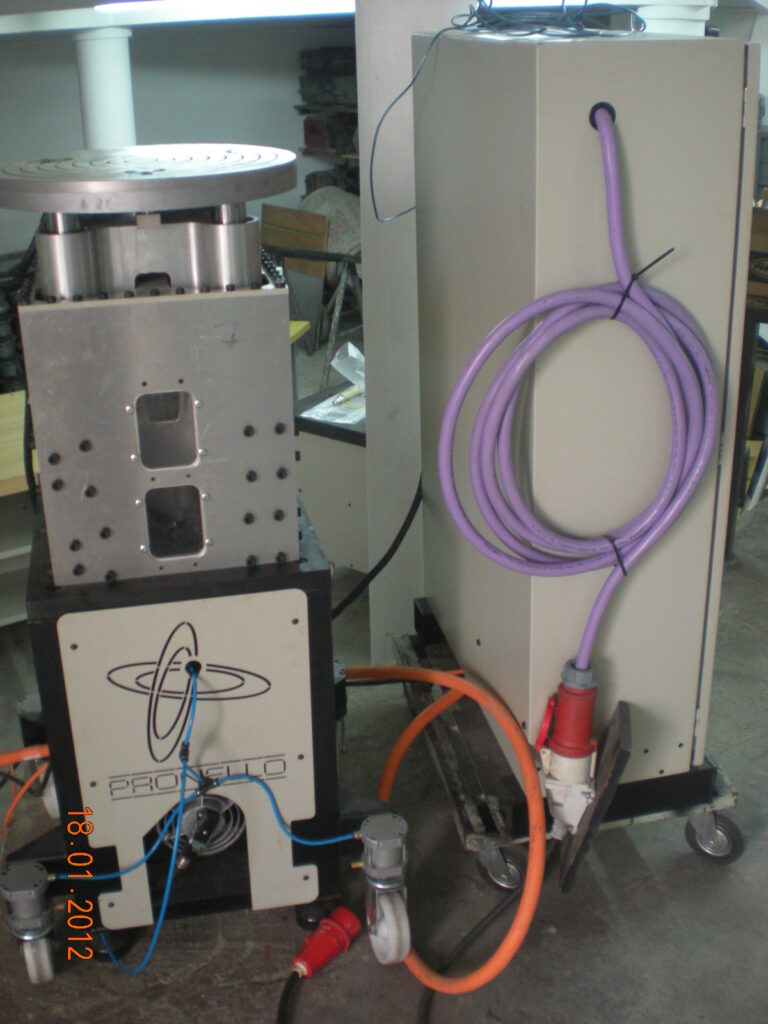
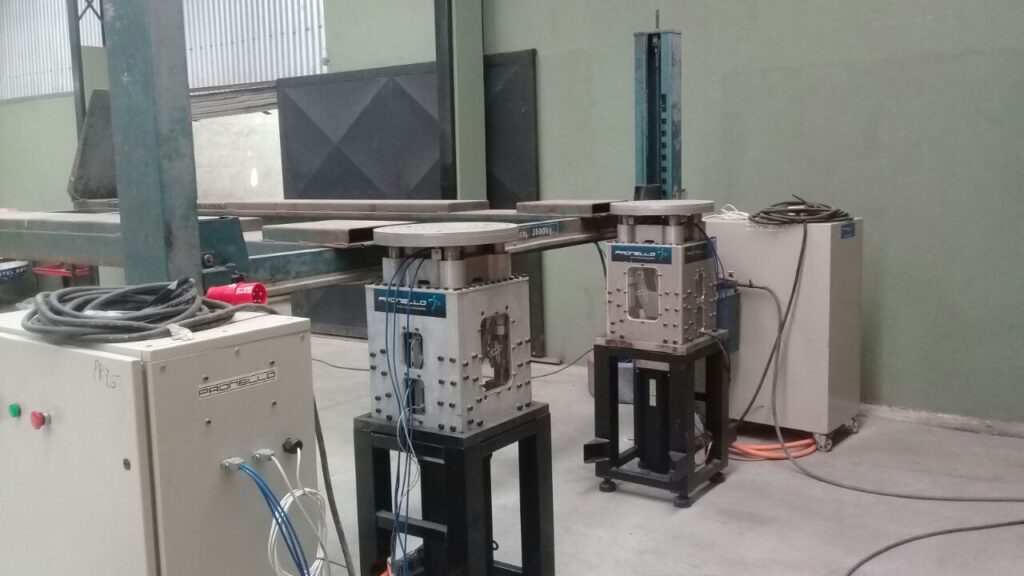
Configuración modular de la servocolumna eléctrica
El usuario puede interconectar hasta 2 o 4 servocolumnas eléctricas en diferentes momentos, para implementar un 4 Post Rig. Pero también puede usar cualquiera que el usuario elija, independientemente, para medir un amortiguador únicamente.
Para probar amortiguadores con una única servocolumna eléctrica, el usuario debe:
a- Retirar la placa de un poste.
b- Instalar el kit de plataforma y barras.
c- Conectar la celda de carga del bloque S.